Принцип PIV измерений
Введение
Цифровая трассерная визуализация (PIV) представляет собой методику для всего поля течения, которая обеспечивает измерение векторов мгновенных скоростей в поперечном сечении потока. Измеряются две компоненты скорости, но стереоскопический подход позволяет регистрировать все три компоненты скорости, что в результате дает информацию о пространственных векторах мгновенных скоростей для всей области.
Принципы
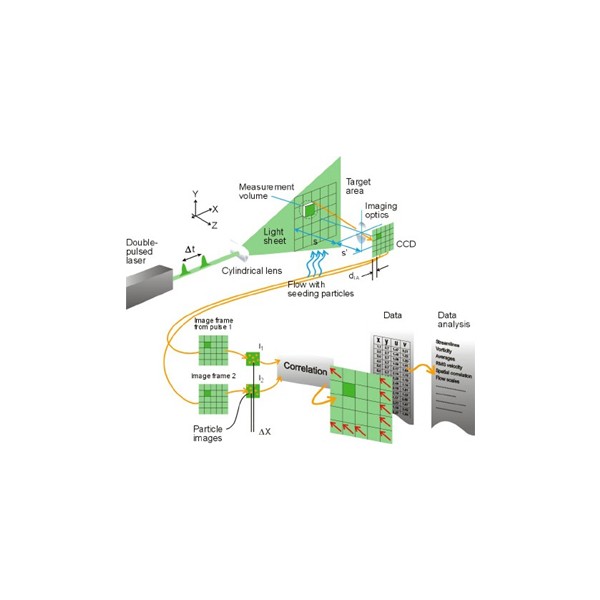
Вектора скоростей получаются из сегментов, на которые разбита целевая область потока, наполненного частицами, путем измерения перемещения частиц между двумя световыми импульсами:

Линза камеры создает изображение целевой области на матрице цифровой камеры. Камера способна запечатлевать каждый световой импульс в отдельных кадрах изображения.

Пространственная разрешающая способность и динамический диапазон
При проведении измерения методом PIV боковая длина области опроса dIA и увеличение изображения s'/s сравниваются с размером структур потока, подлежащих определению. Одним из способов для выражения этого сравнения является установление требования о том, что градиент скорости в пределах элементарной области должен быть маленьким:

наибольшая измеримая скорость ограничена частицами, перемещающимися за пределы области опроса за промежуток времени Dt. В результате нарушается корреляция между двумя кадрами изображения и утрачивается информация о скорости. Как показывает опыт:

При известном размере элементарной области, увеличении изображения и толщине световой плоскости можно определить измеряемый объем.

Третья компонента скорости
В обычных системах PIV третья компонента скорости «не видна» из-за геометрии изображения. Данная третья компонента скорости может быть получена с помощью двух камер, используемых в стереоскопической схеме.

Экспериментальная установка для стереоскопических измерений методом PIV в потоке за моделью автомобиля.